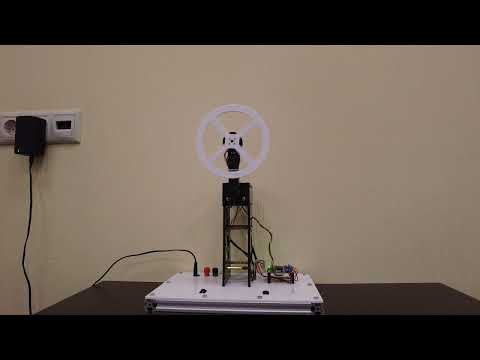
An educational and experimental platform for controlling a reaction wheel inverted pendulum (RWIP). The project includes a description of the system dynamics, control algorithms, and a guide for working with the hardware platform.
The pendulum is capable of operating in the following modes:
- Swing-up (Energy-Shaping Control)
- Stabilization in the upright position (LQR)
- Braking in the downward vertical position (Energy-Shaping Control)
The repository provides a seamless workflow from theory to hardware implementation. It is well-suited for control theory or robotics courses and projects, as well as for individuals interested in mastering the control of unstable systems.
- Theoretical manual
- Python notebook for modeling and control synthesis
- Fully functional microcontroller firmware
- Derivation of the nonlinear model of the inverted pendulum using the Lagrange method
- Linearization of nonlinear models
- Discretization of continuous-time systems
- Controllability and stability criteria
- LQR controller synthesis
- Energy-Shaping Control
Firmwarewheel_pendulum_practicum.ino– microcontroller firmware for pendulum control
Pythonmodel.ipynb– pendulum models + control synthesis
Tutorials– guides and manualsRu_Installation_guide.pdf– software installation guide (in Russian)Ru_Theory.pdf– theoretical description of the dynamics and control + practical guide for working with the hardware platform (in Russian)Eng_Installation_guide.pdf– software installation guide (in English)Eng_Theory.pdf– theoretical description of the dynamics and control + practical guide for working with the hardware platform (in English)
- Install all required software according to the instructions in files
Eng_Installation_guide.pdforRu_Installation_guide.pdf - You can immediately flash the microcontroller with the firmware
wheel_pendulum_practicum.ino - After powering the pendulum control board, wait until the motor initialization completes. Then press the USR button to start the control system.
- To better understand the pendulum control theory, study files
Eng_Theory.pdforRu_Theory.pdf. These files are written as lab manuals. For deeper understanding, complete all practical tasks and answer the review questions included in the text.